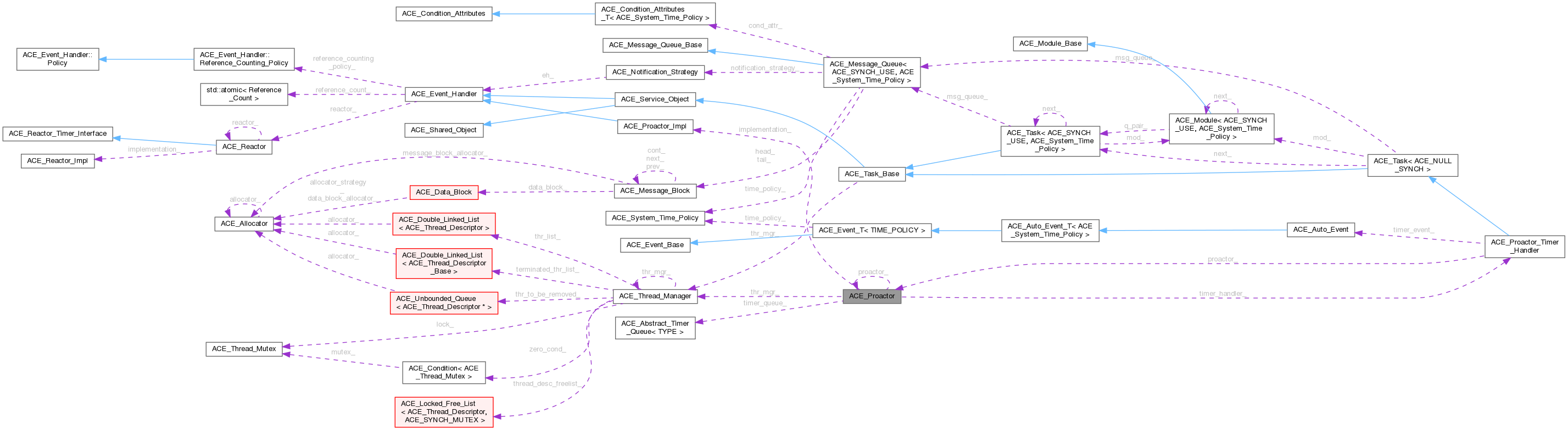
A manager for asynchronous event demultiplexing. More...
#include <Proactor.h>
Public Types | |
| typedef int(* | PROACTOR_EVENT_HOOK) (ACE_Proactor *) |
Static Public Member Functions | |
| static ACE_Proactor * | instance (size_t threads=0) |
| static ACE_Proactor * | instance (ACE_Proactor *proactor, bool delete_proactor=false) |
| static void | close_singleton () |
| Delete the dynamically allocated Singleton. | |
| static void | cleanup (void *instance, void *arg) |
| static const ACE_TCHAR * | dll_name () |
| Name of dll in which the singleton instance lives. | |
| static const ACE_TCHAR * | name () |
| Name of component–ACE_Proactor in this case. | |
| static int | run_event_loop () |
| static int | run_event_loop (ACE_Time_Value &tv) |
| static int | end_event_loop () |
| static int | reset_event_loop () |
| static int | check_reconfiguration (ACE_Proactor *) |
| static int | event_loop_done () |
| Report if the <ACE_Proactor::instance> event loop is finished. | |
Protected Member Functions | |
| int | proactor_post_wakeup_completions (int how_many) |
| void | implementation (ACE_Proactor_Impl *implementation) |
| Set the implementation class. | |
Static Protected Member Functions | |
| static int | post_wakeup_completions (int how_many) |
Protected Attributes | |
| ACE_Proactor_Impl * | implementation_ |
| bool | delete_implementation_ |
| ACE_Proactor_Timer_Handler * | timer_handler_ |
| Handles timeout events. | |
| ACE_Thread_Manager | thr_mgr_ |
| This will manage the thread in the Timer_Handler. | |
| ACE_Proactor_Timer_Queue * | timer_queue_ |
| Timer Queue. | |
| int | delete_timer_queue_ |
| Flag on whether to delete the timer queue. | |
| sig_atomic_t | end_event_loop_ |
| Terminate the proactor event loop. | |
| sig_atomic_t | event_loop_thread_count_ |
| Number of threads in the event loop. | |
| ACE_SYNCH_MUTEX | mutex_ |
| Mutex to protect work with lists. | |
Static Protected Attributes | |
| static ACE_Proactor * | proactor_ = 0 |
| Pointer to a process-wide ACE_Proactor. | |
| static bool | delete_proactor_ = false |
| Must delete the <proactor_> if true. | |
Private Member Functions | |
| ACE_Proactor (const ACE_Proactor &) | |
| Deny access since member-wise won't work... | |
| ACE_Proactor & | operator= (const ACE_Proactor &) |
Friends | |
| class | ACE_Proactor_Timer_Handler |
Detailed Description
A manager for asynchronous event demultiplexing.
See the Proactor pattern description at http://www.dre.vanderbilt.edu/~schmidt/PDF/proactor.pdf for more details.
Member Typedef Documentation
◆ PROACTOR_EVENT_HOOK
| typedef int(* ACE_Proactor::PROACTOR_EVENT_HOOK) (ACE_Proactor *) |
You can add a hook to various run_event methods and the hook will be called after handling every proactor event. If this function returns 0, proactor_run_event_loop will check for the return value of handle_events. If it is -1, the the proactor_run_event_loop will return (pre-maturely.)
◆ TIMER_HEAP
|
private |
◆ TIMER_HEAP_ITERATOR
|
private |
◆ TIMER_LIST
|
private |
◆ TIMER_LIST_ITERATOR
|
private |
◆ TIMER_QUEUE_ITERATOR
◆ TIMER_WHEEL
|
private |
◆ TIMER_WHEEL_ITERATOR
|
private |
Constructor & Destructor Documentation
◆ ACE_Proactor() [1/2]
| ACE_Proactor::ACE_Proactor | ( | ACE_Proactor_Impl * | implementation = 0, |
| bool | delete_implementation = false, | ||
| ACE_Proactor_Timer_Queue * | tq = 0 ) |
Constructor. If implementation is 0, the correct implementation object will be created. delete_implementation flag determines whether the implementation object should be deleted by the Proactor or not. If tq is 0, a new TIMER_QUEUE is created.
◆ ~ACE_Proactor()
| ACE_Proactor::~ACE_Proactor | ( | ) |
Destruction.
◆ ACE_Proactor() [2/2]
|
private |
Deny access since member-wise won't work...
Member Function Documentation
◆ cancel_timer() [1/2]
| int ACE_Proactor::cancel_timer | ( | ACE_Handler & | handler, |
| int | dont_call_handle_close = 1 ) |
Cancel all timers associated with this handler. Returns number of timers cancelled.
◆ cancel_timer() [2/2]
| int ACE_Proactor::cancel_timer | ( | long | timer_id, |
| const void ** | act = 0, | ||
| int | dont_call_handle_close = 1 ) |
Cancel the single <ACE_Handler> that matches the timer_id value (which was returned from the <schedule> method). If act is non-NULL then it will be set to point to the `‘magic cookie’' argument passed in when the <Handler> was registered. This makes it possible to free up the memory and avoid memory leaks. Returns 1 if cancellation succeeded and 0 if the timer_id wasn't found.
◆ check_reconfiguration()
|
static |
The singleton proactor is used by the ACE_Service_Config. Therefore, we must check for the reconfiguration request and handle it after handling an event.
◆ cleanup()
Cleanup method, used by the ACE_Object_Manager to destroy the singleton.
◆ close()
| int ACE_Proactor::close | ( | ) |
Close the associated ACE_Proactor_Impl implementation object.
If
- delete_implementation was specified to the
open()method, the implementation object is also deleted.
◆ close_dispatch_threads()
◆ close_singleton()
|
static |
Delete the dynamically allocated Singleton.
◆ create_asynch_accept()
| ACE_Asynch_Accept_Impl * ACE_Proactor::create_asynch_accept | ( | ) |
Create the correct implementation class for doing Asynch_Accept.
◆ create_asynch_accept_result()
| ACE_Asynch_Accept_Result_Impl * ACE_Proactor::create_asynch_accept_result | ( | ACE_Handler::Proxy_Ptr & | handler_proxy, |
| ACE_HANDLE | listen_handle, | ||
| ACE_HANDLE | accept_handle, | ||
| ACE_Message_Block & | message_block, | ||
| u_long | bytes_to_read, | ||
| const void * | act, | ||
| ACE_HANDLE | event = ACE_INVALID_HANDLE, | ||
| int | priority = 0, | ||
| int | signal_number = ACE_SIGRTMIN ) |
Create the correct implementation class for ACE_Asynch_Accept::Result.
◆ create_asynch_connect()
| ACE_Asynch_Connect_Impl * ACE_Proactor::create_asynch_connect | ( | ) |
Create the correct implementation class for doing Asynch_Connect.
◆ create_asynch_connect_result()
| ACE_Asynch_Connect_Result_Impl * ACE_Proactor::create_asynch_connect_result | ( | ACE_Handler::Proxy_Ptr & | handler_proxy, |
| ACE_HANDLE | connect_handle, | ||
| const void * | act, | ||
| ACE_HANDLE | event = ACE_INVALID_HANDLE, | ||
| int | priority = 0, | ||
| int | signal_number = ACE_SIGRTMIN ) |
Create the correct implementation class for ACE_Asynch_Connect::Result.
◆ create_asynch_read_dgram()
| ACE_Asynch_Read_Dgram_Impl * ACE_Proactor::create_asynch_read_dgram | ( | ) |
Create the correct implementation class for doing Asynch_Read_Dgram.
◆ create_asynch_read_dgram_result()
| ACE_Asynch_Read_Dgram_Result_Impl * ACE_Proactor::create_asynch_read_dgram_result | ( | ACE_Handler::Proxy_Ptr & | handler_proxy, |
| ACE_HANDLE | handle, | ||
| ACE_Message_Block * | message_block, | ||
| size_t | bytes_to_read, | ||
| int | flags, | ||
| int | protocol_family, | ||
| const void * | act, | ||
| ACE_HANDLE | event = ACE_INVALID_HANDLE, | ||
| int | priority = 0, | ||
| int | signal_number = ACE_SIGRTMIN ) |
Create the correct implementation class for ACE_Asynch_Read_Dgram::Result.
◆ create_asynch_read_file()
| ACE_Asynch_Read_File_Impl * ACE_Proactor::create_asynch_read_file | ( | ) |
Create the correct implementation class for doing Asynch_Read_File.
◆ create_asynch_read_file_result()
| ACE_Asynch_Read_File_Result_Impl * ACE_Proactor::create_asynch_read_file_result | ( | ACE_Handler::Proxy_Ptr & | handler_proxy, |
| ACE_HANDLE | handle, | ||
| ACE_Message_Block & | message_block, | ||
| u_long | bytes_to_read, | ||
| const void * | act, | ||
| u_long | offset, | ||
| u_long | offset_high, | ||
| ACE_HANDLE | event = ACE_INVALID_HANDLE, | ||
| int | priority = 0, | ||
| int | signal_number = ACE_SIGRTMIN ) |
Create the correct implementation class for ACE_Asynch_Read_File::Result.
◆ create_asynch_read_stream()
| ACE_Asynch_Read_Stream_Impl * ACE_Proactor::create_asynch_read_stream | ( | ) |
Create the correct implementation class for doing Asynch_Read_Stream.
◆ create_asynch_read_stream_result()
| ACE_Asynch_Read_Stream_Result_Impl * ACE_Proactor::create_asynch_read_stream_result | ( | ACE_Handler::Proxy_Ptr & | handler_proxy, |
| ACE_HANDLE | handle, | ||
| ACE_Message_Block & | message_block, | ||
| u_long | bytes_to_read, | ||
| const void * | act, | ||
| ACE_HANDLE | event = ACE_INVALID_HANDLE, | ||
| int | priority = 0, | ||
| int | signal_number = ACE_SIGRTMIN ) |
Create the correct implementation class for ACE_Asynch_Read_Stream::Result class.
◆ create_asynch_timer()
| ACE_Asynch_Result_Impl * ACE_Proactor::create_asynch_timer | ( | ACE_Handler::Proxy_Ptr & | handler_proxy, |
| const void * | act, | ||
| const ACE_Time_Value & | tv, | ||
| ACE_HANDLE | event = ACE_INVALID_HANDLE, | ||
| int | priority = 0, | ||
| int | signal_number = ACE_SIGRTMIN ) |
Create a timer result object which can be used with the Timer mechanism of the Proactor. If signal_number is -1, <POSIX_SIG_Proactor> will create a Timer object with a meaningful signal number, choosing the largest signal number from the signal mask of the Proactor.
◆ create_asynch_transmit_file()
| ACE_Asynch_Transmit_File_Impl * ACE_Proactor::create_asynch_transmit_file | ( | ) |
Create the correct implementation class for doing Asynch_Transmit_File.
◆ create_asynch_transmit_file_result()
| ACE_Asynch_Transmit_File_Result_Impl * ACE_Proactor::create_asynch_transmit_file_result | ( | ACE_Handler::Proxy_Ptr & | handler_proxy, |
| ACE_HANDLE | socket, | ||
| ACE_HANDLE | file, | ||
| ACE_Asynch_Transmit_File::Header_And_Trailer * | header_and_trailer, | ||
| u_long | bytes_to_write, | ||
| u_long | offset, | ||
| u_long | offset_high, | ||
| u_long | bytes_per_send, | ||
| u_long | flags, | ||
| const void * | act, | ||
| ACE_HANDLE | event = ACE_INVALID_HANDLE, | ||
| int | priority = 0, | ||
| int | signal_number = ACE_SIGRTMIN ) |
Create the correct implementation class for ACE_Asynch_Transmit_File::Result.
◆ create_asynch_write_dgram()
| ACE_Asynch_Write_Dgram_Impl * ACE_Proactor::create_asynch_write_dgram | ( | ) |
Create the correct implementation class for doing Asynch_Write_Dgram.
◆ create_asynch_write_dgram_result()
| ACE_Asynch_Write_Dgram_Result_Impl * ACE_Proactor::create_asynch_write_dgram_result | ( | ACE_Handler::Proxy_Ptr & | handler_proxy, |
| ACE_HANDLE | handle, | ||
| ACE_Message_Block * | message_block, | ||
| size_t | bytes_to_write, | ||
| int | flags, | ||
| const void * | act, | ||
| ACE_HANDLE | event = ACE_INVALID_HANDLE, | ||
| int | priority = 0, | ||
| int | signal_number = ACE_SIGRTMIN ) |
Create the correct implementation class for ACE_Asynch_Write_Dgram::Result.
◆ create_asynch_write_file()
| ACE_Asynch_Write_File_Impl * ACE_Proactor::create_asynch_write_file | ( | ) |
Create the correct implementation class for doing Asynch_Write_File.
◆ create_asynch_write_file_result()
| ACE_Asynch_Write_File_Result_Impl * ACE_Proactor::create_asynch_write_file_result | ( | ACE_Handler::Proxy_Ptr & | handler_proxy, |
| ACE_HANDLE | handle, | ||
| ACE_Message_Block & | message_block, | ||
| u_long | bytes_to_write, | ||
| const void * | act, | ||
| u_long | offset, | ||
| u_long | offset_high, | ||
| ACE_HANDLE | event = ACE_INVALID_HANDLE, | ||
| int | priority = 0, | ||
| int | signal_number = ACE_SIGRTMIN ) |
Create the correct implementation class for ACE_Asynch_Write_File::Result.
◆ create_asynch_write_stream()
| ACE_Asynch_Write_Stream_Impl * ACE_Proactor::create_asynch_write_stream | ( | ) |
Create the correct implementation class for doing Asynch_Write_Stream.
◆ create_asynch_write_stream_result()
| ACE_Asynch_Write_Stream_Result_Impl * ACE_Proactor::create_asynch_write_stream_result | ( | ACE_Handler::Proxy_Ptr & | handler_proxy, |
| ACE_HANDLE | handle, | ||
| ACE_Message_Block & | message_block, | ||
| u_long | bytes_to_write, | ||
| const void * | act, | ||
| ACE_HANDLE | event = ACE_INVALID_HANDLE, | ||
| int | priority = 0, | ||
| int | signal_number = ACE_SIGRTMIN ) |
Create the correct implementation class for ACE_Asynch_Write_Stream::Result.
◆ dll_name()
|
static |
Name of dll in which the singleton instance lives.
◆ end_event_loop()
|
inlinestatic |
Instruct the <ACE_Proactor::instance> to terminate its event loop. This method wakes up all the threads blocked on waiting for completions and end the event loop.
◆ event_loop_done()
|
inlinestatic |
Report if the <ACE_Proactor::instance> event loop is finished.
◆ get_handle()
| ACE_HANDLE ACE_Proactor::get_handle | ( | ) | const |
Get the event handle. It is a no-op in POSIX platforms and it returns ACE_INVALID_HANDLE.
◆ handle_events() [1/2]
| int ACE_Proactor::handle_events | ( | ) |
Block indefinitely until at least one event is dispatched.
- Returns
- Returns 1 when a completion is dispatched. On error, returns -1 and sets errno accordingly.
◆ handle_events() [2/2]
| int ACE_Proactor::handle_events | ( | ACE_Time_Value & | wait_time | ) |
Dispatch a single set of events, waiting up to a specified time limit if necessary.
- Parameters
-
wait_time the time to wait for an event to occur. This is a relative time. On successful return, the time is updated to reflect the amount of time spent waiting for event(s) to occur.
- Returns
- Returns 0 if no events occur before the wait_time expires. Returns 1 when a completion is dispatched. On error, returns -1 and sets errno accordingly.
◆ implementation() [1/2]
| ACE_Proactor_Impl * ACE_Proactor::implementation | ( | ) | const |
Get the implementation class.
◆ implementation() [2/2]
|
protected |
Set the implementation class.
◆ instance() [1/2]
|
static |
Set pointer to a process-wide ACE_Proactor and return existing pointer.
◆ instance() [2/2]
|
static |
Get pointer to a process-wide ACE_Proactor. threads should be part of another method.
◆ name()
|
static |
Name of component–ACE_Proactor in this case.
◆ number_of_threads() [1/2]
| size_t ACE_Proactor::number_of_threads | ( | ) | const |
Get number of thread used as a parameter to CreatIoCompletionPort.
◆ number_of_threads() [2/2]
Set number of thread used as a parameter to CreatIoCompletionPort.
◆ operator=()
|
private |
◆ post_wakeup_completions()
Post <how_many> completions to the completion port so that all threads can wake up. This is used in conjunction with the <run_event_loop>.
◆ proactor_end_event_loop()
| int ACE_Proactor::proactor_end_event_loop | ( | ) |
Instruct the ACE_Proactor to terminate its event loop and notifies the ACE_Proactor so that it can wake up and close down gracefully.
◆ proactor_event_loop_done()
| int ACE_Proactor::proactor_event_loop_done | ( | ) |
Report if the ACE_Proactor event loop is finished.
◆ proactor_post_wakeup_completions()
Post <how_many> completions to the completion port so that all threads can wake up. This is used in conjunction with the <proactor_run_event_loop>.
◆ proactor_reset_event_loop()
| int ACE_Proactor::proactor_reset_event_loop | ( | ) |
Resets the <ACE_Proactor::end_event_loop_> static so that the <run_event_loop> method can be restarted.
◆ proactor_run_event_loop() [1/2]
| int ACE_Proactor::proactor_run_event_loop | ( | ACE_Time_Value & | tv, |
| PROACTOR_EVENT_HOOK | eh = 0 ) |
Run the event loop until the <ACE_Proactor::handle_events> method returns -1, the <end_proactor_event_loop> method is invoked, or the ACE_Time_Value expires, in which case a 0 is returned.
◆ proactor_run_event_loop() [2/2]
| int ACE_Proactor::proactor_run_event_loop | ( | PROACTOR_EVENT_HOOK | eh = 0 | ) |
Run the event loop until the <ACE_Proactor::handle_events> method returns -1 or the <end_proactor_event_loop> method is invoked.
◆ register_handle()
| int ACE_Proactor::register_handle | ( | ACE_HANDLE | handle, |
| const void * | completion_key ) |
This method adds the handle to the I/O completion port. This function is a no-op function for Unix systems and returns 0;
◆ reset_event_loop()
|
inlinestatic |
Resets the <ACE_Proactor::end_event_loop_> static so that the <run_event_loop> method can be restarted.
◆ run_event_loop() [1/2]
|
inlinestatic |
Run the event loop until the <ACE_Proactor::handle_events> method returns -1 or the <end_event_loop> method is invoked.
◆ run_event_loop() [2/2]
|
inlinestatic |
Run the event loop until the <ACE_Proactor::handle_events> method returns -1, the <end_event_loop> method is invoked, or the ACE_Time_Value expires, in which case 0 is returned.
◆ schedule_repeating_timer()
| long ACE_Proactor::schedule_repeating_timer | ( | ACE_Handler & | handler, |
| const void * | act, | ||
| const ACE_Time_Value & | interval ) |
◆ schedule_timer() [1/2]
| long ACE_Proactor::schedule_timer | ( | ACE_Handler & | handler, |
| const void * | act, | ||
| const ACE_Time_Value & | time ) |
Schedule a handler that will expire after <time>. If it expires then act is passed in as the value to the handler's <handle_timeout> callback method. This method returns a <timer_id>. This <timer_id> can be used to cancel a timer before it expires. The cancellation ensures that <timer_ids> are unique up to values of greater than 2 billion timers. As long as timers don't stay around longer than this there should be no problems with accidentally deleting the wrong timer. Returns -1 on failure (which is guaranteed never to be a valid <timer_id>).
◆ schedule_timer() [2/2]
| long ACE_Proactor::schedule_timer | ( | ACE_Handler & | handler, |
| const void * | act, | ||
| const ACE_Time_Value & | time, | ||
| const ACE_Time_Value & | interval ) |
Same as above except interval it is used to reschedule the handler automatically. This combines the above two methods into one. Mostly for backward compatibility.
◆ timer_queue() [1/2]
| ACE_Proactor_Timer_Queue * ACE_Proactor::timer_queue | ( | ) | const |
Get timer queue.
◆ timer_queue() [2/2]
| void ACE_Proactor::timer_queue | ( | ACE_Proactor_Timer_Queue * | timer_queue | ) |
Set timer queue.
◆ wake_up_dispatch_threads()
| int ACE_Proactor::wake_up_dispatch_threads | ( | ) |
Add wakeup dispatch threads (reinit).
Friends And Related Symbol Documentation
◆ ACE_Proactor_Timer_Handler
Timer handler runs a thread and manages the timers, on behalf of the Proactor.
Member Data Documentation
◆ delete_implementation_
|
protected |
Flag used to indicate whether we are responsible for cleaning up the implementation instance.
◆ delete_proactor_
Must delete the <proactor_> if true.
Controls whether the Proactor is deleted when we shut down (we can only delete it safely if we created it!)
◆ delete_timer_queue_
|
protected |
Flag on whether to delete the timer queue.
◆ end_event_loop_
|
protected |
Terminate the proactor event loop.
◆ event_loop_thread_count_
|
protected |
Number of threads in the event loop.
◆ implementation_
|
protected |
Delegation/implementation class that all methods will be forwarded to.
◆ mutex_
|
protected |
Mutex to protect work with lists.
◆ proactor_
|
staticprotected |
Pointer to a process-wide ACE_Proactor.
Process-wide ACE_Proactor.
◆ thr_mgr_
|
protected |
This will manage the thread in the Timer_Handler.
◆ timer_handler_
|
protected |
Handles timeout events.
◆ timer_queue_
|
protected |
Timer Queue.
The documentation for this class was generated from the following files: