TAO::Remote_Invocation Class Reference
Base class for remote invocations. More...
#include <Remote_Invocation.h>
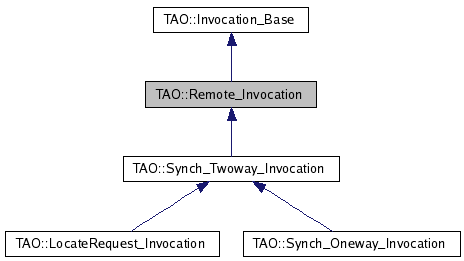
Inheritance diagram for TAO::Remote_Invocation:
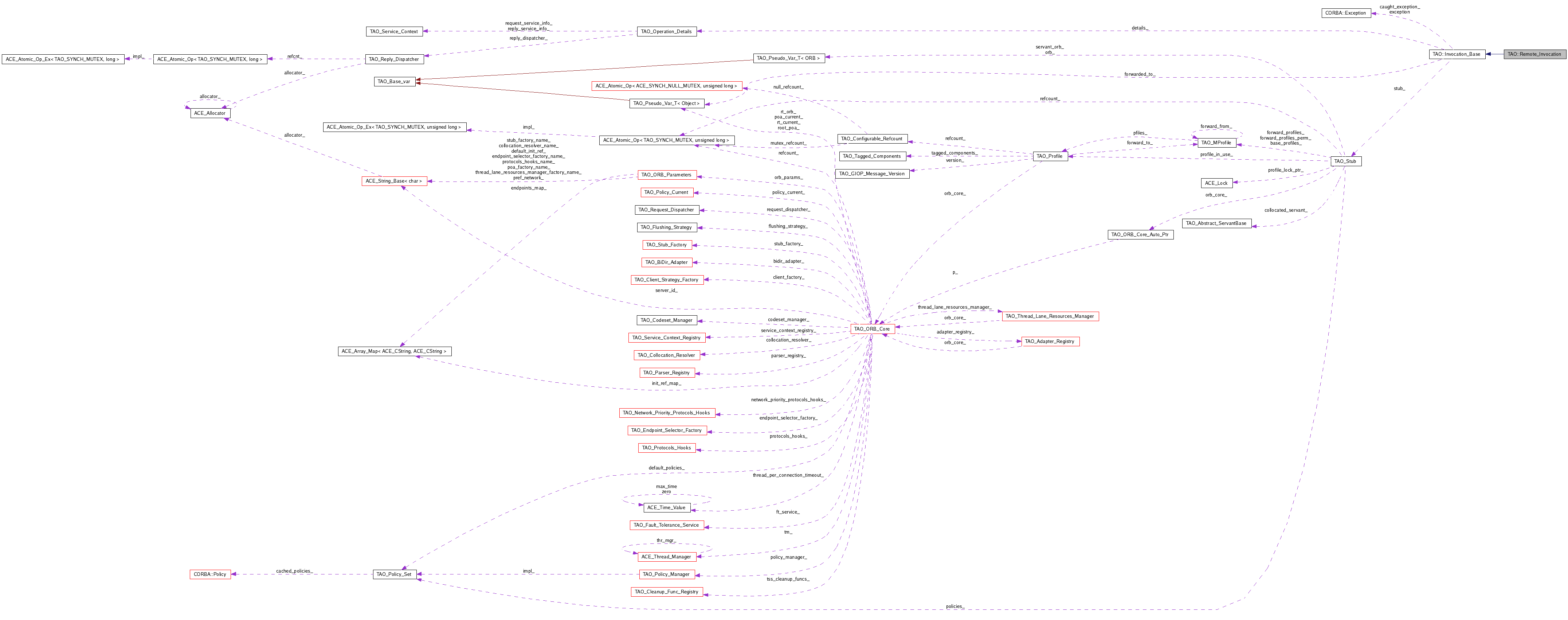
Collaboration diagram for TAO::Remote_Invocation:
Public Member Functions | |
| Remote_Invocation (CORBA::Object_ptr otarget, Profile_Transport_Resolver &resolver, TAO_Operation_Details &detail, bool response_expected) | |
Protected Member Functions | |
| void | init_target_spec (TAO_Target_Specification &spec, TAO_OutputCDR &output) |
| Initialize the spec. | |
| void | write_header (TAO_OutputCDR &out_stream) |
| Write the GIOP header into the stream. | |
| void | marshal_data (TAO_OutputCDR &cdr) |
| Marshal the arguments into the stream. | |
| Invocation_Status | send_message (TAO_OutputCDR &cdr, TAO_Message_Semantics message_semantics, ACE_Time_Value *max_wait_time) |
| Write the message onto the socket. | |
Protected Attributes | |
| Profile_Transport_Resolver & | resolver_ |
| Our resolver. | |
Detailed Description
Base class for remote invocations.This class encapulates some of the common functionalities used by synchronous, asynchronous, DII and DSI invocations.
Constructor & Destructor Documentation
| TAO::Remote_Invocation::Remote_Invocation | ( | CORBA::Object_ptr | otarget, | |
| Profile_Transport_Resolver & | resolver, | |||
| TAO_Operation_Details & | detail, | |||
| bool | response_expected | |||
| ) |
- Parameters:
-
otarget The original target on which this invocation was started. This is there to be passed up to its parent class. resolver The profile and transport holder. detail Pperation details of the invocation on the target response_expected Flag to indicate whether the operation encapsulated by op returns a response or not.
Member Function Documentation
| void TAO::Remote_Invocation::init_target_spec | ( | TAO_Target_Specification & | spec, | |
| TAO_OutputCDR & | output | |||
| ) | [protected] |
Initialize the spec.
| void TAO::Remote_Invocation::marshal_data | ( | TAO_OutputCDR & | cdr | ) | [protected] |
Marshal the arguments into the stream.
| Invocation_Status TAO::Remote_Invocation::send_message | ( | TAO_OutputCDR & | cdr, | |
| TAO_Message_Semantics | message_semantics, | |||
| ACE_Time_Value * | max_wait_time | |||
| ) | [protected] |
Write the message onto the socket.
| void TAO::Remote_Invocation::write_header | ( | TAO_OutputCDR & | out_stream | ) | [protected] |
Write the GIOP header into the stream.
Member Data Documentation
Profile_Transport_Resolver& TAO::Remote_Invocation::resolver_ [protected] |
Our resolver.
The documentation for this class was generated from the following files: