#include <Module.h>
Inheritance diagram for ACE_Module<>:
Public Methods | |
| ACE_Module (void) | |
| Create an empty Module. | |
| ~ACE_Module (void) | |
| Shutdown the Module. | |
| ACE_Module (const ACE_TCHAR *module_name, ACE_Task< ACE_SYNCH_USE > *writer=0, ACE_Task< ACE_SYNCH_USE > *reader=0, void *args=0, int flags=M_DELETE) | |
| int | open (const ACE_TCHAR *module_name, ACE_Task< ACE_SYNCH_USE > *writer=0, ACE_Task< ACE_SYNCH_USE > *reader=0, void *a=0, int flags=M_DELETE) |
| int | close (int flags=M_DELETE_NONE) |
| ACE_Task< ACE_SYNCH_USE > * | writer (void) |
| Get the writer task. | |
| void | writer (ACE_Task< ACE_SYNCH_USE > *q, int flags=M_DELETE_WRITER) |
| ACE_Task< ACE_SYNCH_USE > * | reader (void) |
| Get the reader task. | |
| void | reader (ACE_Task< ACE_SYNCH_USE > *q, int flags=M_DELETE_READER) |
| ACE_Task< ACE_SYNCH_USE > * | sibling (ACE_Task< ACE_SYNCH_USE > *orig) |
| Set and get pointer to sibling ACE_Task in an ACE_Module. | |
| const ACE_TCHAR * | name (void) const |
| Get the module name. | |
| void | name (const ACE_TCHAR *) |
| Set the module name. | |
| void * | arg (void) const |
| Get the argument passed to the tasks. | |
| void | arg (void *) |
| Set the argument passed to the tasks. | |
| void | link (ACE_Module< ACE_SYNCH_USE > *m) |
| Link to other modules in the ustream stack. | |
| ACE_Module< ACE_SYNCH_USE > * | next (void) |
| Get the next pointer to the module above in the stream. | |
| void | next (ACE_Module< ACE_SYNCH_USE > *m) |
| Set the next pointer to the module above in the stream. | |
| void | dump (void) const |
| Dump the state of an object. | |
Public Attributes | |
| ACE_ALLOC_HOOK_DECLARE | |
| Declare the dynamic allocation hooks. | |
Private Methods | |
| int | close_i (int which, int flags) |
Private Attributes | |
| ACE_Task< ACE_SYNCH_USE > * | q_pair_ [2] |
| ACE_TCHAR | name_ [MAXNAMLEN+1] |
| Name of the ACE_Module. | |
| ACE_Module< ACE_SYNCH_USE > * | next_ |
| Next ACE_Module in the stack. | |
| void * | arg_ |
| int | flags_ |
Friends | |
| class | ACE_Shutup_GPlusPlus |
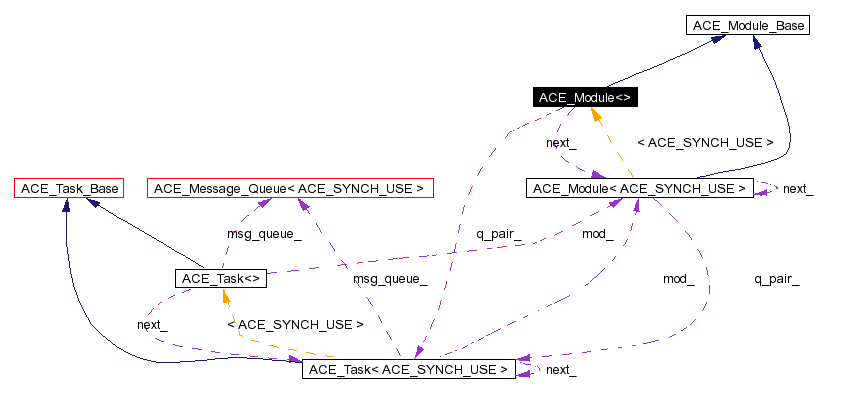
This is based on the Module concept in System V Streams, which contains a pair of Tasks, one for handling upstream processing, one for handling downstream processing. In general, you shouldn't subclass from this class, but instead subclass from the <ACE_Task>.
|
||||||||||
|
Create an empty Module.
|
|
||||||||||
|
Shutdown the Module.
|
|
||||||||||||||||||||||||||||
|
Create an initialized module with module_name as its identity and reader and writer as its tasks. |
|
||||||||||
|
Set the argument passed to the tasks.
|
|
||||||||||
|
Get the argument passed to the tasks.
|
|
||||||||||
|
Close down the Module and its Tasks. The flags argument can be used to override the default behaviour, which depends on previous <flags> values in calls to c'tor, <open>, <reader>, and <writer>. A previous value M_DELETE[_XXX] can not be overridden. Should not be called from within <ACE_Task::module_closed>. |
|
||||||||||||||||
|
Implements the close operation for either the reader or the writer task (depending on <which>). |
|
||||||||||
|
Dump the state of an object.
|
|
||||||||||
|
Link to other modules in the ustream stack.
|
|
||||||||||
|
Set the module name.
|
|
||||||||||
|
Get the module name.
|
|
||||||||||
|
Set the next pointer to the module above in the stream.
|
|
||||||||||
|
Get the next pointer to the module above in the stream.
|
|
||||||||||||||||||||||||||||
|
Create an initialized module with <module_name> as its identity and <reader> and <writer> as its tasks. Previously register reader or writers or closed down and deleted according to the value of flags_. Should not be called from within <ACE_Task::module_closed>. |
|
||||||||||||||||
|
Set the reader task. <flags> can be used to indicate that the module should delete the reader during a call to close or to the destructor. If a previous reader exists, it is closed. It may also be deleted, depending on the old flags_ value. Should not be called from within <ACE_Task::module_closed>. |
|
||||||||||
|
Get the reader task.
|
|
||||||||||
|
Set and get pointer to sibling ACE_Task in an ACE_Module.
|
|
||||||||||||||||
|
Set the writer task. <flags> can be used to indicate that the module should delete the writer during a call to close or to the destructor. If a previous writer exists, it is closed. It may also be deleted, depending on the old flags_ value. Should not be called from within <ACE_Task::module_closed>. |
|
||||||||||
|
Get the writer task.
|
|
|||||
|
|
|
|||||
|
Declare the dynamic allocation hooks.
|
|
|||||
|
Argument passed through to the reader and writer task when they are opened. |
|
|||||
|
Holds flags which are used to determine if the reader and writer task have to be deleted on exit |
|
|||||
|
Name of the ACE_Module.
|
|
|||||
|
Next ACE_Module in the stack.
|
|
|||||
|
Pair of Tasks that form the "read-side" and "write-side" of the ACE_Module partitioning. |
 1.2.18
1.2.18