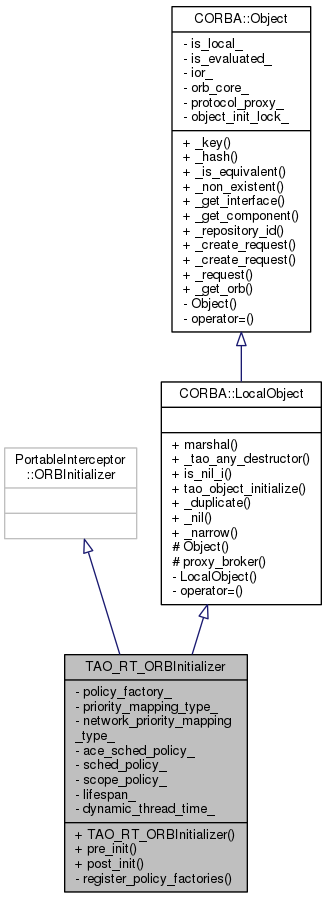
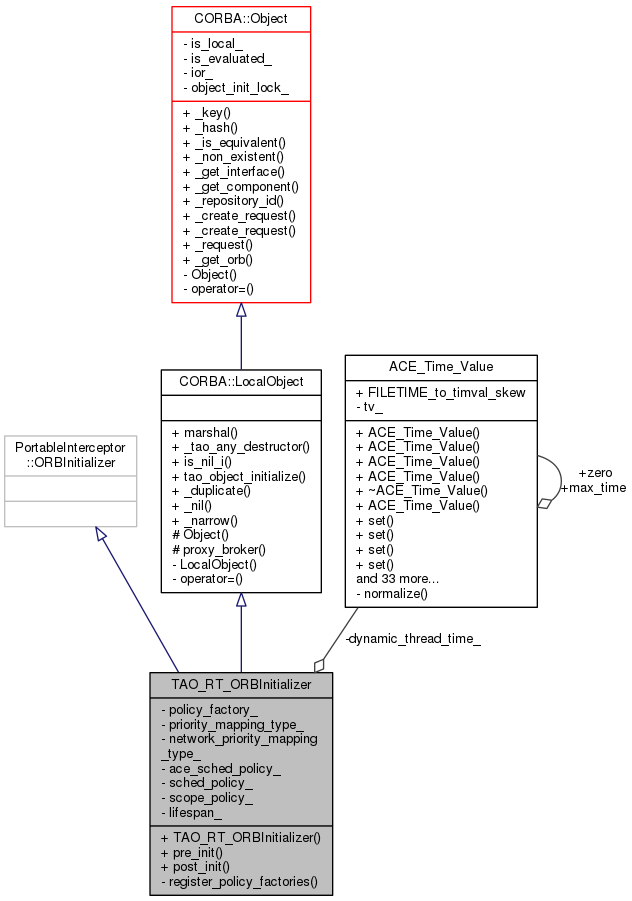
RTCORBA ORB initializer.
More...
#include <RT_ORBInitializer.h>
Priority mapping types.
| Enumerator |
|---|
| TAO_PRIORITY_MAPPING_CONTINUOUS |
|
| TAO_PRIORITY_MAPPING_LINEAR |
|
| TAO_PRIORITY_MAPPING_DIRECT |
|
| Enumerator |
|---|
| TAO_NETWORK_PRIORITY_MAPPING_LINEAR |
|
Lifespan of the dynamic threads TAO_RTCORBA_DT_INFINITIVE When the Dynamic Thread is created it will run forever TAO_RTCORBA_DT_IDLE When the Dynamic Thread is created it will run until it has been idle for the specified amount of time TAO_RTCORBA_DT_FIXED When the Dynamic Thread is created it will run for the specified fix amount of time
| Enumerator |
|---|
| TAO_RTCORBA_DT_INFINITIVE |
|
| TAO_RTCORBA_DT_IDLE |
|
| TAO_RTCORBA_DT_FIXED |
|
| void TAO_RT_ORBInitializer::post_init |
( |
PortableInterceptor::ORBInitInfo_ptr |
info | ) |
|
|
virtual |
| void TAO_RT_ORBInitializer::pre_init |
( |
PortableInterceptor::ORBInitInfo_ptr |
info | ) |
|
|
virtual |
| void TAO_RT_ORBInitializer::register_policy_factories |
( |
PortableInterceptor::ORBInitInfo_ptr |
info | ) |
|
|
private |
| int const TAO_RT_ORBInitializer::ace_sched_policy_ |
|
private |
Scheduling policy.
Scheduling policy specified by the user through the -ORBSchedPolicy option. This value is typically used by functions like ACE_OS::thr_setprio() and ACE_Sched_Params::priority_min(). Legal values are ACE_SCHED_RR, ACE_SCHED_FIFO, and ACE_SCHED_OTHER.
Dynamic thread time.
When using thread pool a certain number of dynamic threads can be created. By default these threads are created when needed but never end. Optionally a time can be specified
| int const TAO_RT_ORBInitializer::network_priority_mapping_type_ |
|
private |
Network Priority mapping type.
| PortableInterceptor::PolicyFactory_var TAO_RT_ORBInitializer::policy_factory_ |
|
private |
Instance of the RTCorba policy factory.
The RTCorba policy factory is stateless and reentrant, so share a single instance between all ORBs.
| int const TAO_RT_ORBInitializer::priority_mapping_type_ |
|
private |
| long const TAO_RT_ORBInitializer::sched_policy_ |
|
private |
Scheduling policy flag.
Scheduling policy specified by the user through the -ORBSchedPolicy option. This value is typically used by ACE thread creation functions. Legal values are THR_SCHED_RR, THR_SCHED_FIFO, and THR_SCHED_DEFAULT.
| long const TAO_RT_ORBInitializer::scope_policy_ |
|
private |
Scheduling scope flag.
Scheduling policy specified by the user through the -ORBScopePolicy option. This value is typically used by ACE thread creation functions. Legal values are THR_SCOPE_SYSTEM and THR_SCOPE_PROCESS.
The documentation for this class was generated from the following files:


 Public Types inherited from CORBA::LocalObject
Public Types inherited from CORBA::LocalObject 1.8.3.1
1.8.3.1