#include <Stream_Modules.h>
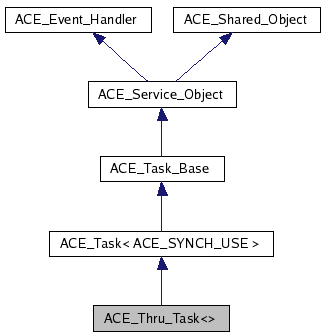
Inheritance diagram for ACE_Thru_Task<>:

Public Member Functions | |
| ACE_Thru_Task (void) | |
| Construction. | |
| ~ACE_Thru_Task (void) | |
| Destruction. | |
| virtual int | open (void *a=0) |
| virtual int | close (u_long flags=0) |
| virtual int | put (ACE_Message_Block *msg, ACE_Time_Value *=0) |
| virtual int | svc (void) |
| Run by a daemon thread to handle deferred processing. | |
| virtual int | init (int argc, ACE_TCHAR *argv[]) |
| Initializes object when dynamic linking occurs. | |
| virtual int | info (ACE_TCHAR **info_string, size_t length) const |
| Returns information on a service object. | |
| virtual int | fini (void) |
| Terminates object when dynamic unlinking occurs. | |
| void | dump (void) const |
| Dump the state of an object. | |
Public Attributes | |
| ACE_ALLOC_HOOK_DECLARE | |
| Declare the dynamic allocation hooks. | |
| ACE_Thru_Task<>::ACE_Thru_Task | ( | void | ) |
Construction.
| ACE_Thru_Task<>::~ACE_Thru_Task | ( | void | ) |
Destruction.
| int ACE_Thru_Task<>::close | ( | u_long | flags = 0 |
) | [virtual] |
Hook called from ACE_Thread_Exit when during thread exit and from the default implementation of <module_closed>. In general, this method shouldn't be called directly by an application, particularly if the <Task> is running as an Active Object. Instead, a special message should be passed into the <Task> via the <put> method defined below, and the <svc> method should interpret this as a flag to shut down the <Task>.
Reimplemented from ACE_Task_Base.
| void ACE_Thru_Task<>::dump | ( | void | ) | const |
| int ACE_Thru_Task<>::fini | ( | void | ) | [virtual] |
| int ACE_Thru_Task<>::info | ( | ACE_TCHAR ** | info_string, | |
| size_t | length | |||
| ) | const [virtual] |
| int ACE_Thru_Task<>::init | ( | int | argc, | |
| ACE_TCHAR * | argv[] | |||
| ) | [virtual] |
| int ACE_Thru_Task<>::open | ( | void * | a = 0 |
) | [virtual] |
Hook called to initialize a task and prepare it for execution. args can be used to pass arbitrary information into <open>.
Reimplemented from ACE_Task_Base.
| int ACE_Thru_Task<>::put | ( | ACE_Message_Block * | msg, | |
| ACE_Time_Value * | = 0 | |||
| ) | [virtual] |
A hook method that can be used to pass a message to a task, where it can be processed immediately or queued for subsequent processing in the <svc> hook method.
Reimplemented from ACE_Task_Base.
| int ACE_Thru_Task<>::svc | ( | void | ) | [virtual] |
| ACE_Thru_Task<>::ACE_ALLOC_HOOK_DECLARE |
 1.4.7-1
1.4.7-1