#include <ECG_Mcast_EH.h>
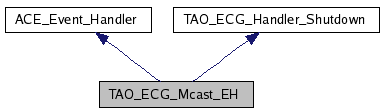
Inheritance diagram for TAO_ECG_Mcast_EH:

Public Member Functions | |
| virtual int | handle_input (ACE_HANDLE fd) |
| TAO_ECG_Mcast_EH (TAO_ECG_Dgram_Handler *recv, const ACE_TCHAR *net_if=0, CORBA::ULong buf_sz=0) | |
| Initialization and termination methods. | |
| virtual | ~TAO_ECG_Mcast_EH (void) |
| Destructor. | |
| void | open (RtecEventChannelAdmin::EventChannel_ptr ec) |
| virtual int | shutdown (void) |
| TAO_ECG_Handler_Shutdown method. | |
Private Types | |
| typedef ACE_Unbounded_Set< ACE_INET_Addr > | Address_Set |
| typedef ACE_Array_Base< Subscription > | Subscriptions |
Private Member Functions | |
| void | update_consumer (const RtecEventChannelAdmin::ConsumerQOS &sub) throw (CORBA::SystemException) |
| void | compute_required_subscriptions (const RtecEventChannelAdmin::ConsumerQOS &sub, Address_Set &multicast_addresses) throw (CORBA::SystemException) |
| int | delete_unwanted_subscriptions (Address_Set &multicast_addresses) |
| void | add_new_subscriptions (Address_Set &multicast_addresses) |
Private Attributes | |
| ACE_TCHAR * | net_if_ |
| The NIC used to subscribe for multicast traffic. | |
| Subscriptions | subscriptions_ |
| List of multicast addresses we subscribe to and dgrams we use. | |
| TAO_ECG_Dgram_Handler * | receiver_ |
| We callback to this object when a message arrives. | |
| CORBA::ULong | recvbuf_size_ |
| SOCKbuf size. | |
| TAO_EC_Servant_Var< Observer > | observer_ |
| TAO_EC_Auto_Command< Observer_Disconnect_Command > | auto_observer_disconnect_ |
Friends | |
| class | Observer |
| Make update_consumer () accessible to Observer. | |
Classes | |
| class | Observer |
| Observes changes in the EC consumer subscriptions and notifies TAO_ECG_Mcast_EH when there are changes. More... | |
| class | Observer_Disconnect_Command |
| Disconnects Observer from the Event Channel. More... | |
| struct | Subscription |
This object acts as an Observer to Event Channel. It subscribes to multicast groups that carry events matching the EC's subscriptions. This object then receives callbacks from the Reactor when data is available on the mcast sockets and alerts TAO_ECG_Dgram_Handler, which reads the data, transforms it into event and pushes to the Event Channel.
typedef ACE_Unbounded_Set<ACE_INET_Addr> TAO_ECG_Mcast_EH::Address_Set [private] |
typedef ACE_Array_Base<Subscription> TAO_ECG_Mcast_EH::Subscriptions [private] |
| TAO_BEGIN_VERSIONED_NAMESPACE_DECL TAO_ECG_Mcast_EH::TAO_ECG_Mcast_EH | ( | TAO_ECG_Dgram_Handler * | recv, | |
| const ACE_TCHAR * | net_if = 0, |
|||
| CORBA::ULong | buf_sz = 0 | |||
| ) |
Initialization and termination methods.
Constructor. Messages received by this EH will be forwarded to the recv. net_if can be used to specify NIC where multicast messages are expected. would be used to alter the default buffer size.
See comments for receiver_ data member on why raw pointer is used for the recv argument.
| TAO_ECG_Mcast_EH::~TAO_ECG_Mcast_EH | ( | void | ) | [virtual] |
Destructor.
| void TAO_ECG_Mcast_EH::add_new_subscriptions | ( | Address_Set & | multicast_addresses | ) | [private] |
| multicast_addresses | List of multicast addresses to which we need to subscribe to in order to be receiving all event types in the current consumer subscriptions. |
| void TAO_ECG_Mcast_EH::compute_required_subscriptions | ( | const RtecEventChannelAdmin::ConsumerQOS & | sub, | |
| Address_Set & | multicast_addresses | |||
| ) | throw (CORBA::SystemException) [private] |
| sub | The list of event types that our event channel consumers are interested in. | |
| multicast_addresses | This method populates this list with multicast addresses that we need to be subscribed to in order to receive event types specified in /a sub. |
| CORBA::SystemException | This method needs to perform several CORBA invocations, and it propagates any exceptions back to the caller. |
| int TAO_ECG_Mcast_EH::delete_unwanted_subscriptions | ( | Address_Set & | multicast_addresses | ) | [private] |
| multicast_addresses | List of multicast addresses we need to be subscribed to in order receive all event types in the current consumer subscriptions. |
| int TAO_ECG_Mcast_EH::handle_input | ( | ACE_HANDLE | fd | ) | [virtual] |
Reactor callback. Notify receiver_ that a dgram corresponding to fd is ready for reading.
Reimplemented from ACE_Event_Handler.
| void TAO_ECG_Mcast_EH::open | ( | RtecEventChannelAdmin::EventChannel_ptr | ec | ) |
Register for changes in the EC subscription list. When the subscription list becomes non-empty we join the proper multicast groups (using Dgram_Handler to translate between event types and mcast groups) and the class registers itself with the reactor.
To insure proper resource clean up, if open () is successful, the user MUST call shutdown () when handler is no longer needed (and its reactor still exists).
| int TAO_ECG_Mcast_EH::shutdown | ( | void | ) | [virtual] |
TAO_ECG_Handler_Shutdown method.
Remove ourselves from the event channel, unsubscribe from the multicast groups, close the sockets and deregister from the reactor.
Implements TAO_ECG_Handler_Shutdown.
| void TAO_ECG_Mcast_EH::update_consumer | ( | const RtecEventChannelAdmin::ConsumerQOS & | sub | ) | throw (CORBA::SystemException) [private] |
The Observer method. Subscribe/unsubscribe to multicast groups according to changes in consumer subscriptions.
TAO_EC_Auto_Command<Observer_Disconnect_Command> TAO_ECG_Mcast_EH::auto_observer_disconnect_ [private] |
Manages connection of our observer to the Event Channel. ORDER DEPENDENCY: this member should be declared AFTER <observer_>.
ACE_TCHAR* TAO_ECG_Mcast_EH::net_if_ [private] |
The NIC used to subscribe for multicast traffic.
Event Channel Observer. Detects changes in EC consumer subscriptions. ORDER DEPENDENCY: this member should be declared before <auto_observer_disconnect_>.
TAO_ECG_Dgram_Handler* TAO_ECG_Mcast_EH::receiver_ [private] |
We callback to this object when a message arrives.
CORBA::ULong TAO_ECG_Mcast_EH::recvbuf_size_ [private] |
SOCKbuf size.
List of multicast addresses we subscribe to and dgrams we use.
 1.4.7-1
1.4.7-1