
#include <Synch_Invocation.h>
Inheritance diagram for TAO::Synch_Twoway_Invocation:
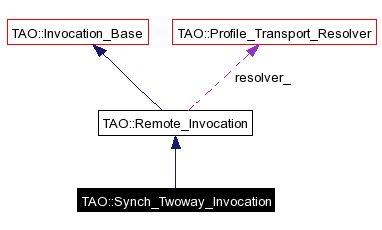
An object of this is type is created by TAO::Invocation_Adapter and invokes a method on this class. The method takes care of creating and sending a request, waiting for a reply and demarshalling the reply for the client.
|
||||||||||||||||||||
|
Constructor used by TAO::Invocation_Adapter.
|
|
|
This method returns an exception when there is an error. |
|
|
Helper method used to handle system exceptions from the remote objects. |
|
|
This method is selectively made virtual, so that inherited classes can overload the user exception handling type. For example the DII needs a totally different method of user exception exception handling |
|
|
Helper method used to handle location forwarded replies.
|
|
|
There is a exception declaration in this method which ensures that the exceptions propogated by the remote objects are converted a CORBA exceptions for the clients. This method does a bunch of things necessary to create and send the invocation. This method is also nerve centre for the interceptor invocation points. |
|
||||||||||||||||
|
As the name suggests waits for a reply from the remote ORB. This method returns an exception when there is an error. |
 1.3.9.1
1.3.9.1