#include <Activator_Options.h>
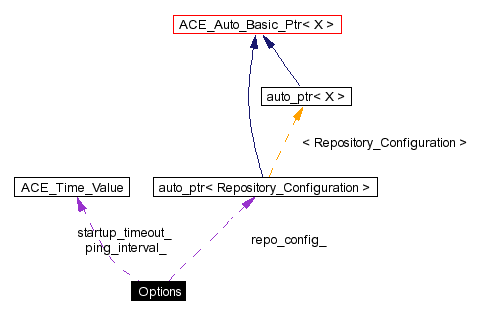
Collaboration diagram for Options:
Public Types | |
| enum | REPO_MODE { REPO_NONE, REPO_XML_FILE, REPO_HEAP_FILE, REPO_REGISTRY } |
| enum | SERVICE_COMMAND { SC_NONE, SC_INSTALL, SC_REMOVE } |
| enum | SERVICE_COMMAND { SC_NONE, SC_INSTALL, SC_REMOVE } |
Public Methods | |
| Options () | |
| Default Constructor. | |
| int | init (int argc, char *argv[]) |
| Parse the command-line arguments and initialize the options. | |
| bool | service (void) const |
| Service Mode. | |
| unsigned int | debug (void) const |
| Debug level for the Implementation Repository. | |
| ACE_CString | output_filename (void) const |
| Returns the file where the IOR should be stored. | |
| Repository_Configuration * | config (void) const |
| Returns the configuration object. | |
| int | repository_mode (void) |
| ACE_CString | file_name (void) const |
| Returns the file name. | |
| const char * | convert_str (ImplementationRepository::ActivationMode mode) |
| ImplementationRepository::ActivationMode | convert_mode (const char *mode) |
| ACE_Time_Value | startup_timeout (void) const |
| Returns the timeout value for program starting. | |
| ACE_Time_Value | ping_interval (void) const |
| Returns the timeout value for program starting. | |
| CORBA::ORB_ptr | orb (void) const |
| Returns a pointer to the ORB. | |
| bool | multicast (void) const |
| Will we listen for multicast location requests? | |
| bool | readonly (void) const |
| Do we allow modifications to the servers? | |
| Options () | |
| Default Constructor. | |
| int | init (int argc, char *argv[]) |
| Parse the command-line arguments and initialize the options. | |
| bool | service (void) const |
| Service Mode. | |
| unsigned int | debug (void) const |
| Debug level for the Implementation Repository. | |
| ACE_CString | output_filename (void) const |
| Returns the file where the IOR should be stored. | |
| CORBA::ORB_ptr | orb (void) const |
| Returns a pointer to the ORB. | |
| bool | multicast (void) const |
| Will we listen for multicast location requests? | |
Private Methods | |
| int | parse_args (int &argc, char *argv[]) |
| Parses and pulls out arguments for the ImR. | |
| void | print_usage (void) const |
| Print the usage information. | |
| int | initialize_persistence (void) |
| Wrapper for the other initialize_persistence() methods. | |
| int | initialize_heap_persistence (void) |
| Initialize heap file persistence. | |
| int | initialize_registry_persistence (void) |
| Initialize Registry persistence. | |
| int | initialize_non_persistence (void) |
| Initialize default heap for no persistence. | |
| int | initialize_xml_persistence (void) |
| Initialize XML file persistence. | |
| int | run_service_command (const ACE_CString &cmdline) |
| Run a service command. | |
| int | load_registry_options (char *&cmdline, ACE_ARGV &argv) |
| Loads ORB options from the registry. | |
| int | save_registry_options (const ACE_CString &cmdline) |
| int | parse_args (int &argc, char *argv[]) |
| Parses and pulls out arguments for the ImR. | |
| void | print_usage (void) const |
| Print the usage information. | |
| int | run_service_command (const ACE_CString &cmdline) |
| Run a service command. | |
| int | load_registry_options (char *&cmdline, ACE_ARGV &argv) |
| Loads ORB options from the registry. | |
| int | save_registry_options (const ACE_CString &cmdline) |
Private Attributes | |
| auto_ptr< Repository_Configuration > | repo_config_ |
| The persistent configuration object. | |
| int | repo_mode_ |
| Mode of the Server Repository: if XML (x) or non-XML (n). | |
| ACE_CString | file_name_ |
| The persistent file option. | |
| unsigned int | debug_ |
| Debug level. | |
| ACE_CString | ior_output_file_ |
| File where the IOR of the server object is stored. | |
| bool | multicast_ |
| Will we listen for multicast location requests? | |
| CORBA::ORB_var | orb_ |
| The ORB for the Implementation Repository. | |
| ACE_Time_Value | ping_interval_ |
| The amount of time between successive "are you started yet?" pings. | |
| bool | service_ |
| Are we running as a service? | |
| ACE_Time_Value | startup_timeout_ |
| The amount of time to wait for a server to response after starting it. | |
| bool | readonly_ |
| Can the server_repository be modified? | |
| int | service_command_ |
| SC_NONE, SC_INSTALL, SC_REMOVE, ... | |
This is where all the settings for TAO's Implementation Repository is stored.
|
|
|
|
|
|
|
|
|
|
|
Default Constructor. Default Constructor. Assigns default values to all the member variables. |
|
|
Default Constructor.
|
|
|
Returns the configuration object.
|
|
|
|
|
|
Converts the activation mode to a const char *. Needed to put the activation mode into the XML file or print it out. |
|
|
Debug level for the Implementation Repository.
|
|
|
Debug level for the Implementation Repository. Debug level for the IR.
|
|
|
Returns the file name.
|
|
||||||||||||
|
Parse the command-line arguments and initialize the options.
|
|
||||||||||||
|
Parse the command-line arguments and initialize the options.
|
|
|
Initialize heap file persistence. The most portable form of persistence is file persistence. Here we assign an ACE_Configuration_Heap object using
|
|
|
Initialize default heap for no persistence. In cases where persistence isn't needed, create an object of the ACE_Configuration_Heap class to be used. Initializes this->repo_config_ to an opened ACE_Configuration_Heap.
|
|
|
Wrapper for the other initialize_persistence() methods.
|
|
|
Initialize Registry persistence. On Windows, we have the option of using the Registry to store the server data. Assigns a ACE_Configuration_Win32Registry to this->repo_config_. On non-Win32 systems, just returns an error.
|
|
|
Initialize XML file persistence.
|
|
||||||||||||
|
Loads ORB options from the registry.
|
|
||||||||||||
|
Loads ORB options from the registry. We will only load from the registry if we are a service. We load each parameter from individual string keys, and then we have to parse the cmdline property into the orb_options so that they can be passed to ORB_init() |
|
|
Will we listen for multicast location requests?
|
|
|
Will we listen for multicast location requests?
|
|
|
Returns a pointer to the ORB.
|
|
|
Returns a pointer to the ORB.
|
|
|
Returns the file where the IOR should be stored.
|
|
|
Returns the file where the IOR should be stored.
|
|
||||||||||||
|
Parses and pulls out arguments for the ImR.
|
|
||||||||||||
|
Parses and pulls out arguments for the ImR. parse_args uses an ACE_Arg_Shifter to grab all the options that are specific to the ImR. If running as an nt service, most of these options will come from the registry instead.
|
|
|
Returns the timeout value for program starting.
|
|
|
Print the usage information.
|
|
|
Print the usage information. Just print out the usage message to STDERR |
|
|
Do we allow modifications to the servers?
|
|
|
|
|
|
Run a service command.
|
|
|
Run a service command. Executes the various commands that are useful for a NT service. Right now these include 'install' and 'remove'. Others, such as 'start' and 'stop' can be added, but the 'net' program in Windows already handles these commands.
|
|
|
|
|
|
|
|
|
Service Mode.
|
|
|
Service Mode. Standalone Mode
|
|
|
Returns the timeout value for program starting.
|
|
|
Debug level.
|
|
|
The persistent file option.
|
|
|
File where the IOR of the server object is stored.
|
|
|
Will we listen for multicast location requests?
|
|
|
The ORB for the Implementation Repository.
|
|
|
The amount of time between successive "are you started yet?" pings.
|
|
|
Can the server_repository be modified?
|
|
|
The persistent configuration object.
|
|
|
Mode of the Server Repository: if XML (x) or non-XML (n).
|
|
|
Are we running as a service?
|
|
|
SC_NONE, SC_INSTALL, SC_REMOVE, ...
|
|
|
The amount of time to wait for a server to response after starting it.
|
 1.2.18
1.2.18