|
DAnCE
..
|


All Classes Namespaces Files Functions Variables Typedefs Enumerations Enumerator Friends Macros Groups Pages
|
DAnCE
..
|
Responsible for maintaining the Domain Information. More...
#include <DomainDataManager.h>
Public Member Functions | |
| int | update_domain (const ::CORBA::StringSeq &elements, const ::Deployment::Domain &domainSubset,::Deployment::DomainUpdateKind updateKind) |
| This function is called by the other classes to update current domain data. | |
| ::Deployment::Domain * | get_initial_domain (void) |
| This function is called from the Executor code to get the Original Domain data. | |
| ::Deployment::Domain * | get_current_domain (void) |
| This function is called from the Executor code to get the Current Domain data. | |
| ::Deployment::ResourceCommitmentManager_ptr | commitResources (const ::Deployment::ResourceAllocations &resources) |
| returns the sequence of node managers object reference | |
| void | releaseResources (const ::Deployment::ResourceCommitmentManager_ptr manager) |
| The function releases the resources held by a plan. | |
| void | commitResourceAllocation (const ::Deployment::ResourceAllocations &resources) |
| The function allocates resources specified in the parameter. | |
| void | releaseResourceAllocation (const ::Deployment::ResourceAllocations &resources) |
| The function releases resources specified in the parameter. | |
| void | init (CORBA::ORB_ptr orb,::Deployment::TargetManager_ptr target, const ACE_TCHAR *domain_name) |
| Initializing DomainDataManager. | |
Private Types | |
| enum | Action { commit, release } |
| The different action that can take place. More... | |
Private Member Functions | |
| int | readin_domain_data (void) |
| It will read the initial Domain data from XML files. | |
| void | match_requirement_resource (::Deployment::InstanceResourceDeploymentDescriptions deployed,::Deployment::Resources &available) |
| Match the deployed resources to the available resource. | |
| void | match_properties (::Deployment::Properties deployed,::Deployment::SatisfierProperties &available) |
| Match the properties of a Requirement to the properties of available resource. | |
| void | commit_release_resource (::Deployment::Property &deployed,::Deployment::SatisfierProperty &available) |
| Either commits or releases the given resource based on the current Action set. | |
| int | call_all_node_managers (void) |
| This function calls all NM and gives them the sub-domain. | |
| int | add_to_domain (const ::Deployment::Domain &domain) |
| This function add new elements to the already existing domain. | |
| int | delete_from_domain (const ::Deployment::Domain &domain) |
| This function deletes elements from the domain. | |
| int | intimate_planner (const ::Deployment::Domain &domain) |
| This function intimates the planner about a domain change. | |
| bool | find_in_initial_domain (const char *node_name,::Deployment::Node &node) |
| This function finds a new node in the initial_domain. | |
| bool | find_in_provisioned_domain (const char *node_name,::Deployment::Node &node) |
| This function finds a new node in the proviosiond_domain. | |
| bool | update_node_status () |
| updates the node status by reading it from a file | |
| ::Deployment::Resource & | find_resource (const ::Deployment::ResourceAllocation &resource) |
| It finds the Resource structure which is respresents the ResourceAllocation. | |
| int | commit_release_RA (const ::Deployment::ResourceAllocations &resources) |
Private Attributes | |
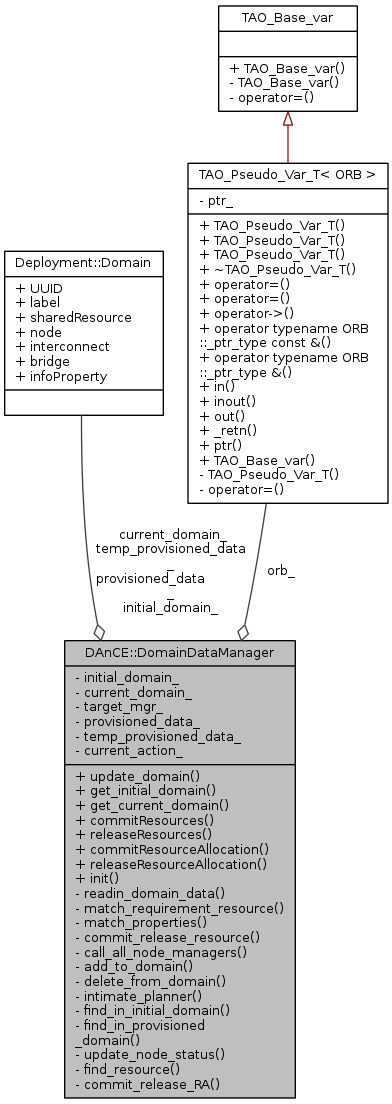
| CORBA::ORB_var | orb_ |
| The ORB pointer. | |
| ::Deployment::Domain | initial_domain_ |
| The Deployment Configuration. | |
| ::Deployment::Domain | current_domain_ |
| The Current Domain - contains resources at current capacity. | |
| ::Deployment::TargetManager_var | target_mgr_ |
| The Target Manager Context. | |
| ::Deployment::Domain | provisioned_data_ |
| ::Deployment::Domain | temp_provisioned_data_ |
| Action | current_action_ |
| The current action. | |
Responsible for maintaining the Domain Information.
It maintains both the Current Domain Information as well as the Initial domain at full capacity.
|
private |
|
private |
This function add new elements to the already existing domain.
| domain | Deployment::Domain contians the new elements |
|
private |
This function calls all NM and gives them the sub-domain.
|
private |
|
private |
Either commits or releases the given resource based on the current Action set.
| deployed | Deployment::Property is the resource to be commited/released |
| available | Deployment::SatisfierProperty is the available resource from which committed/released. |
| Deployment::ResourceNotAvailable | thrown when the deployed resources exceeds the available resource. |
| void DAnCE::DomainDataManager::commitResourceAllocation | ( | const ::Deployment::ResourceAllocations & | resources | ) |
The function allocates resources specified in the parameter.
This function is for the ResourceCommitmentManager
| Deployment::ResourceCommitmentManager_ptr DAnCE::DomainDataManager::commitResources | ( | const ::Deployment::ResourceAllocations & | resources | ) |
returns the sequence of node managers object reference
|
private |
This function deletes elements from the domain.
| domain | Deployment::Domain contains the new elements in the domain |
|
private |
This function finds a new node in the initial_domain.
| node | The name of the node which is to be searched |
|
private |
This function finds a new node in the proviosiond_domain.
| node | The name of the node which is to be searched |
|
private |
It finds the Resource structure which is respresents the ResourceAllocation.
find_resource
| Deployment::Domain * DAnCE::DomainDataManager::get_current_domain | ( | void | ) |
This function is called from the Executor code to get the Current Domain data.
| Deployment::Domain * DAnCE::DomainDataManager::get_initial_domain | ( | void | ) |
This function is called from the Executor code to get the Original Domain data.
| void DAnCE::DomainDataManager::init | ( | CORBA::ORB_ptr | orb, |
| ::Deployment::TargetManager_ptr | target, | ||
| const ACE_TCHAR * | domain_name | ||
| ) |
Initializing DomainDataManager.
This function inits the DomainDataManager
|
private |
This function intimates the planner about a domain change.
| domain | Deployment::Domain contains the new elements in the domain |
|
private |
Match the properties of a Requirement to the properties of available resource.
| deployed | The deployed Properties |
| available | The available Properties |
|
private |
Match the deployed resources to the available resource.
|
private |
It will read the initial Domain data from XML files.
| void DAnCE::DomainDataManager::releaseResourceAllocation | ( | const ::Deployment::ResourceAllocations & | resources | ) |
The function releases resources specified in the parameter.
This function is for the ResourceCommitmentManager
| void DAnCE::DomainDataManager::releaseResources | ( | const ::Deployment::ResourceCommitmentManager_ptr | manager | ) |
The function releases the resources held by a plan.
| int DAnCE::DomainDataManager::update_domain | ( | const ::CORBA::StringSeq & | elements, |
| const ::Deployment::Domain & | domainSubset, | ||
| ::Deployment::DomainUpdateKind | updateKind | ||
| ) |
This function is called by the other classes to update current domain data.
| elements | The string sequence of elements being updated |
| domainSubset | The subset of the actual Domain to be updated |
| updateKind | Specifies the update type eg. add, delete, update |
|
private |
updates the node status by reading it from a file
|
private |
The current action.
|
private |
The Current Domain - contains resources at current capacity.
|
private |
The Deployment Configuration.
The Initial Domain - contains resources at total capacity
|
private |
The ORB pointer.
|
private |
The static provisioned Domain data
|
private |
The Target Manager Context.
|
private |
temporary domain used in commit/release to guard against exceptions
 1.8.2
1.8.2