Represent a thread blocked, as a follower, in the Leader/Followers set. More...
#include <LF_Follower.h>
Inheritance diagram for TAO_LF_Follower:
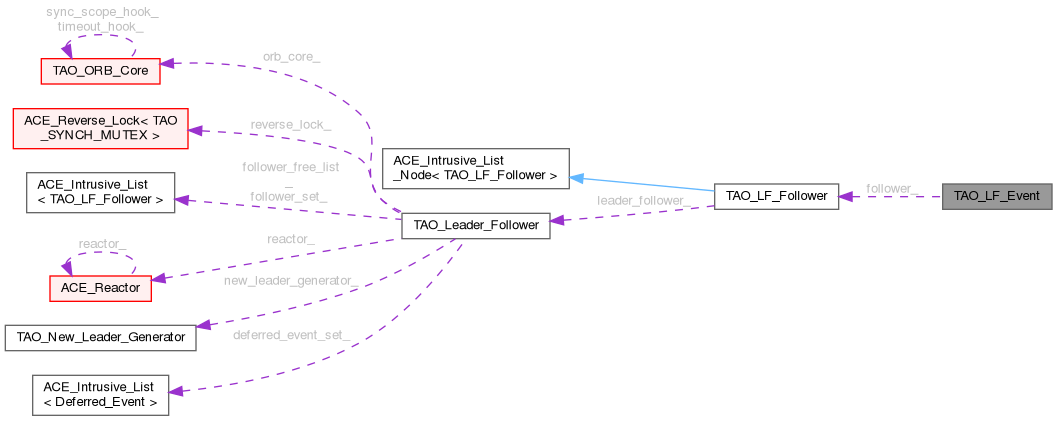
Collaboration diagram for TAO_LF_Follower:
Public Member Functions | |
| TAO_LF_Follower (TAO_Leader_Follower &leader_follower) | |
| Constructor. | |
| ~TAO_LF_Follower () | |
| Destructor. | |
| TAO_Leader_Follower & | leader_follower () |
| Access the leader follower that owns this follower. | |
| int | wait (ACE_Time_Value *tv) |
| Wait until on the underlying condition variable. | |
| int | signal () |
| Signal the underlying condition variable. | |
 Public Member Functions inherited from ACE_Intrusive_List_Node< TAO_LF_Follower > Public Member Functions inherited from ACE_Intrusive_List_Node< TAO_LF_Follower > | |
| T * | prev () const |
| void | prev (T *) |
| T * | next () const |
| void | next (T *) |
Private Attributes | |
| TAO_Leader_Follower & | leader_follower_ |
| The Leader/Follower set this Follower belongs to. | |
| ACE_SYNCH_CONDITION | condition_ |
| Condition variable used to. | |
Additional Inherited Members | |
| Protected Member Functions inherited from ACE_Intrusive_List_Node< TAO_LF_Follower > | |
| ACE_Intrusive_List_Node ()=default | |
Detailed Description
Represent a thread blocked, as a follower, in the Leader/Followers set.
- Todo
- Currently this class offers little abstraction, the follower loop should be implemented by this class.
Constructor & Destructor Documentation
◆ TAO_LF_Follower()
| TAO_LF_Follower::TAO_LF_Follower | ( | TAO_Leader_Follower & | leader_follower | ) |
Constructor.
◆ ~TAO_LF_Follower()
| TAO_LF_Follower::~TAO_LF_Follower | ( | ) |
Destructor.
Member Function Documentation
◆ leader_follower()
| TAO_Leader_Follower & TAO_LF_Follower::leader_follower | ( | ) |
Access the leader follower that owns this follower.
◆ signal()
| int TAO_LF_Follower::signal | ( | ) |
Signal the underlying condition variable.
◆ wait()
| int TAO_LF_Follower::wait | ( | ACE_Time_Value * | tv | ) |
Wait until on the underlying condition variable.
Member Data Documentation
◆ condition_
|
private |
Condition variable used to.
◆ leader_follower_
|
private |
The Leader/Follower set this Follower belongs to.
The documentation for this class was generated from the following files: