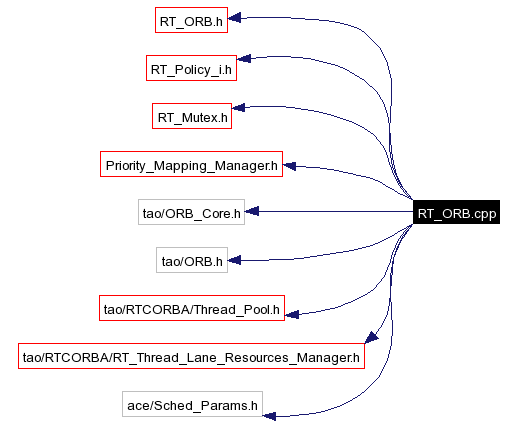
#include "RT_ORB.h"#include "RT_Policy_i.h"#include "RT_Mutex.h"#include "Priority_Mapping_Manager.h"#include "tao/ORB_Core.h"#include "tao/ORB.h"#include "tao/RTCORBA/Thread_Pool.h"#include "tao/RTCORBA/RT_Thread_Lane_Resources_Manager.h"#include "ace/Sched_Params.h"Include dependency graph for RT_ORB.cpp:
 1.3.9.1
1.3.9.1